
01OBSERVABILITY
What does omnidirectional awareness require?
Studying telemetry ingest, state reconstruction, and the geometry of situational awareness across heterogeneous fleets.
ARGUS is an independent research initiative mapping the operational substrate that autonomous fleets, sites, and machines will require — observability, orchestration, and supervision as first-order infrastructure primitives.
A working reference model for the operational stack beneath fleet-scale autonomy — from edge telemetry up to human supervision.
DIAGRAM IS A WORKING ARTIFACT — SUBJECT TO REVISION AS THE STUDY DEVELOPS.
Six open questions the initiative is working through — primitives of the operational layer beneath autonomy at scale.
Studying telemetry ingest, state reconstruction, and the geometry of situational awareness across heterogeneous fleets.
Mapping mission scheduling, conflict resolution, and infrastructure-aware routing as concurrent agent counts grow.
Investigating distributed perception, model placement, and the surfaces through which anomalies become legible.
Exploring exception management, intervention workflows, and audit-grade event structures designed for sustained load.
Examining degradation, demand, and environmental drift as forecastable properties of distributed physical systems.
Studying continuity through partial connectivity, regional partitions, and degraded modes across distributed deployments.
Charting where autonomy is converging with physical infrastructure — and where the operational layer remains incomplete.
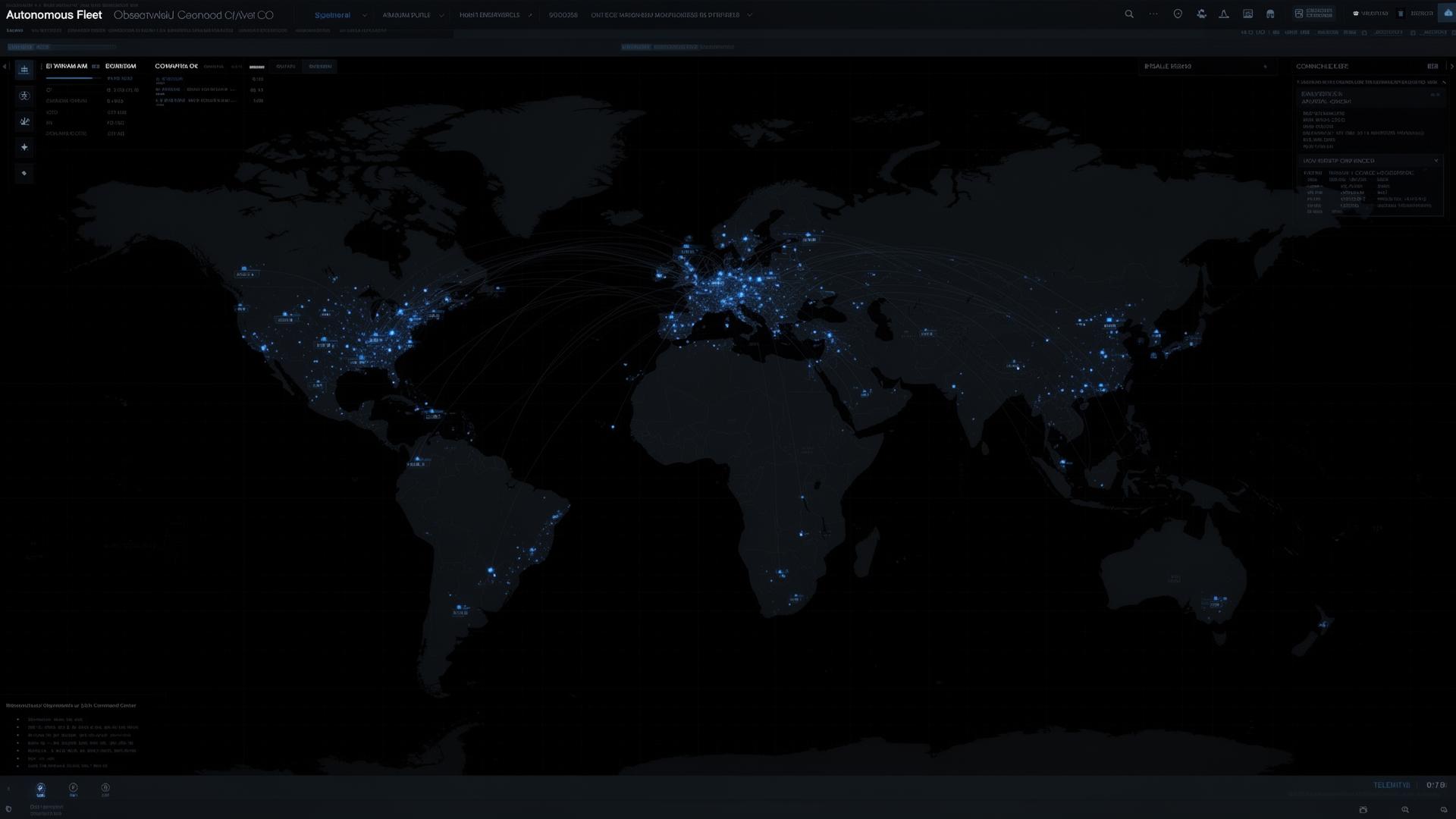
MAP IS NON-EXHAUSTIVE — PUBLISHED AS PART OF AN ONGOING STUDY, NOT A DEPLOYMENT CLAIM.
An independent research initiative studying the operational infrastructure beneath autonomy at scale.
ARGUS examines observability, orchestration, and supervision as the primitives that become load-bearing when fleet-scale operation shifts from a robotics problem to an infrastructure one.
The work is the artifact. Reference models, notes, and correspondence — no product, no roadmap, no announcement.